Publications
- See also: Google Scholar profile.
Publications Sorted by Type
-
Journals (47)
-
2026
-
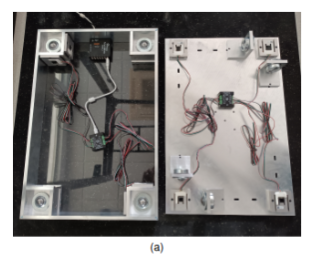
An affordable open-source 3D force platform and a wide force range calibration method
Measurement, 2026.


 2025
2025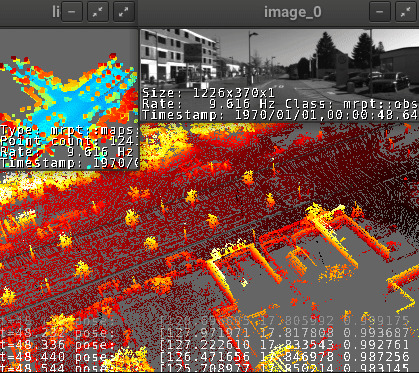
A flexible framework for accurate LiDAR odometry, map manipulation, and localization
The International Journal of Robotics Research (IJRR), vol. 44, no. 9, pp. 1553-1599, 2025, (Q1, T1).
 2024
2024
Autonomous collaborative mobile robot for greenhouses: Design, development, and validation tests
Smart Agricultural Technology, vol. 9, no. 100606, 2024, (Q1, T1).
Mechanism and Machine Theory, vol. 198, pp. 105657, 2024, (Q1, T1).
Mobile Robotic Dataset for a Typical Mediterranean Greenhouse: The GREENBOT Dataset
Sensors, 2024, (Q2, T2).
2023
IEEE Robotics & Automation Magazine, vol. 30, no. 4, pp. 91-97, 2023, (Q1, T1).

SoftwareX, vol. 23, pp. 101443, 2023, (Q2, T2).
2021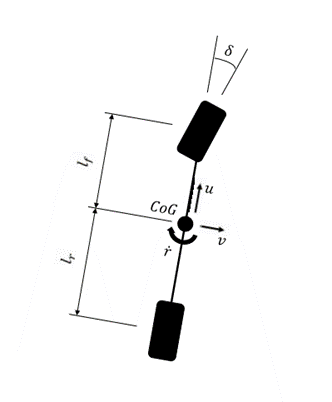
A Factor Graph-based approach to vehicle sideslip angle estimation
Sensors, vol. 21, no. 16, pp. 5409, 2021, (Q2, T1).
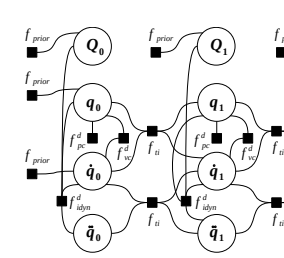
A general framework for modeling and dynamic simulation of multibody systems using factor graphs
Nonlinear Dynamics, vol. 105, no. 3, pp. 2031-2053, 2021, (Q1, T1).
2020
Modelado y control multivariable del vehículo urbano eléctrico UAL-eCARM (in Spanish)
") Revista Iberoamericana de Automática e Informática industrial, vol. 17, no. 2, 2020, (Q4, T3).
Revista Iberoamericana de Automática e Informática industrial, vol. 17, no. 2, 2020, (Q4, T3). 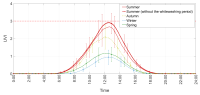
Ultraviolet index (UVI) inside an Almería-type greenhouse (Southeastern Spain)
Agronomy, vol. 10, no. 1, pp. 145, 2020, (Q1, T1).
2019
Benchmarking Particle Filter Algorithms for Efficient Velodyne-Based Vehicle Localization
Sensors, vol. 19, pp. 3155, 2019, (Q1, T1).
OLAE-ICP: Robust and fast alignment of geometric features with the optimal linear attitude estimator
arXiv preprint 1906.10783 [cs.RO], University of Almeria, 2019.

Uncertainty-aware Calibration of a Hot-Wire Anemometer with Gaussian Process Regression
IEEE Sensors Journal, vol. 19, no. 17, pp. 7515--7524, 2019, (Q1, T1).
2018
Computers and Electronics in Agriculture, 2018, (Q1, T1).

Computers and Electronics in Agriculture, vol. 145C, pp. 105--121, 2018, (Q1, T1).
2017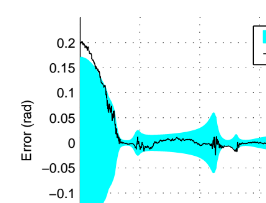
Accuracy and efficiency comparison of various nonlinear Kalman filters applied to multibody models
Nonlinear Dynamics, vol. 88, no. 3, pp. 1935--1951, 2017, (Q1, T1).
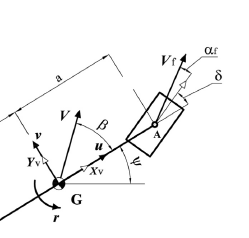
Vehicle parameter estimation using a model-based estimator
Mechanical Systems and Signal Processing, vol. 87, pp. 227-241, 2017, (Q1, T1).
2016
Analysis and validation of grid DEM generation based on Gaussin Markov Random Field
ISPRS - The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. XLI-B2, pp. 277-284, 2016, (Q3, T2).

Online Kinematic and Dynamic-State Estimation for Constrained Multibody Systems Based on IMUs
Sensors, vol. 16, no. 3, pp. 333, 2016, (Q1, T1).

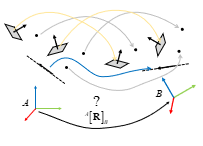
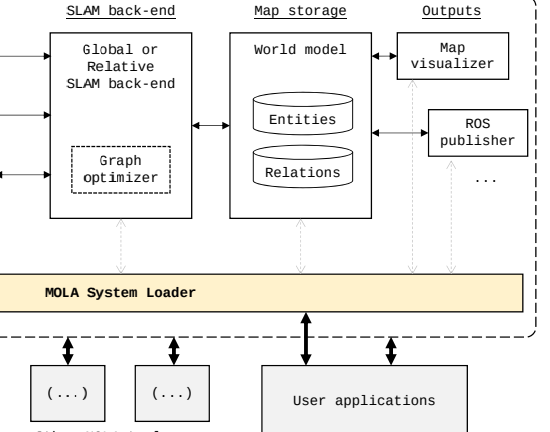
A constant-time SLAM back-end in the continuum between global mapping and submapping: application to visual stereo SLAM
International Journal of Robotics Research, no. 35, pp. 1036-1056, 2016, (Q1, T1).
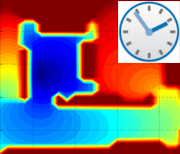
Time-Variant Gas Distribution Mapping with Obstacle Information
Autonomous Robots, vol. 40, no. 1, pp. 1--16, 2016, (Q2, T2).
Odor recognition in robotics applications by discriminative time-series modeling
Pattern Analysis and Applications, vol. 19, no. 1, pp. 207-220, 2016, (Q3, T2).
2015
Sensors, vol. 15, no. 10, pp. 27374-27392, 2015, (Q1, T1).
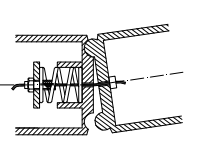
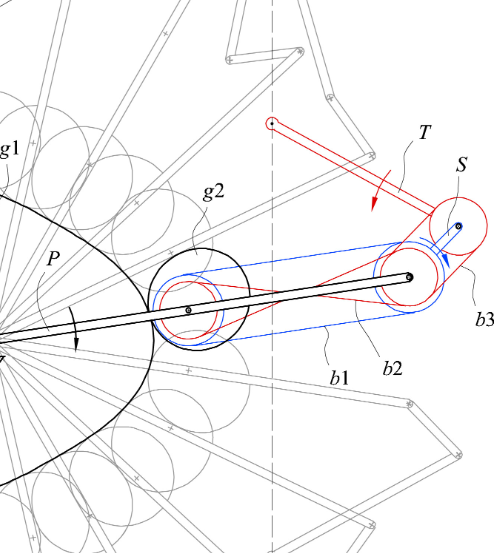
Design and analysis of a flexible linkage for robot safe operation in collaborative scenarios
Mechanism and Machine Theory, vol. 92, pp. 1-16, 2015, (Q2, T1).
Efficient Reactive Navigation with Exact Collision Determination for 3D Robot Shapes
International Journal of Advanced Robotic Systems, vol. 12, no. 63, 2015, (Q4, T3).

TP-Space RRT: Kinematic path planning of non-holonomic any-shape vehicles
International Journal of Advanced Robotic Systems, vol. 12, no. 55, 2015, (Q4, T3).

Multibody dynamic systems as Bayesian Networks: applications to robust state estimation of mechanisms
Multibody System Dynamics, vol. 34, no. 2, pp. 103-128, 2015, (Q3, T2).
2014
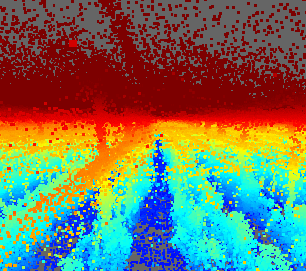
The Málaga Urban Dataset: High-rate Stereo and Lidars in a realistic urban scenario
International Journal of Robotics Research, vol. 33, no. 2, pp. 207-214, 2014, (Q1, T1).
2013
Sensors and Actuators B: Chemical, vol. 188, no. 0, pp. 298--312, 2013, (Q1, T1).

An instrumented vehicle for efficient and accurate 3D mapping of roads
Computer-Aided Civil and Infrastructure Engineering (CACAIE), vol. 28, no. 6, 2013, (Q1, T1).

A Robust, Multi-Hypothesis Approach to Matching Occupancy Grid Maps
Robotica, vol. 31, no. 5, pp. 687-701, 2013, (Q3, T2).
2012
Overcoming the slow recovery of MOX gas sensors through a system modeling approach
Sensors, vol. 12, no. 10, pp. 13664--13680, 2012, (Q1, T1).

A Lego Mindstorms NXT approach for teaching at data acquisition, control systems engineering and real-time systems undergraduate courses
Computers & Education, vol. 59, no. 3, 2012, (Q1, T1).

An alternative to the Mahalanobis distance for determining optimal correspondences in data association
IEEE Transactions on Robotics (T-RO), vol. 28, no. 4, 2012, (Q1, T1).
2011
The Multi-Chamber Electronic Nose--An Improved Olfaction Sensor for Mobile Robotics
Sensors, vol. 11, no. 6, pp. 6145--6164, 2011, (Q1, T1).
2010
Optimal Filtering for Non-Parametric Observation Models: Applications to Localization and SLAM
The International Journal of Robotics Research (IJRR), vol. 29, no. 14, 2010, (Q1, T1).
2009
A Collection of Outdoor Robotic Datasets with centimeter-accuracy Ground Truth
Autonomous Robots, vol. 27, no. 4, pp. 327--351, 2009, (Q2, T2).
Stereo vision-specific models for Particle Filter-based SLAM
Robotics and Autonomous Systems, vol. 57, no. 9, pp. 955--970, 2009, (Q2, T2).
Mobile Robot Localization based on Ultra-Wide-Band Ranging: A Particle Filter Approach
Robotics and Autonomous Systems, vol. 57, no. 5, pp. 496--507, 2009, (Q2, T2).
Subjective Local Maps for Hybrid Metric-Topological SLAM
Robotics and Autonomous Systems, vol. 57, no. 1, pp. 64--74, 2009, (Q2, T2).
2008
La Silla Robótica SENA: un Enfoque Basado en la Interacción Hombre-Máquina (in spanish)
RIAI, Revista Iberoamericana de Automática e Informática Industrial, vol. 5, no. 2, pp. 38--47, 2008.
A Novel Measure of Uncertainty for Mobile Robot SLAM with Rao-Blackwellized Particle Filters
International Journal of Robotics Research, vol. 27, no. 1, pp. 73--81, 2008, (Q1, T1).

Extending Obstacle Avoidance Methods through Multiple Parameter-Space Transformations
Autonomous Robots, vol. 24, no. 1, pp. 29--48, 2008, (Q2, T2).
Towards a Unified Bayesian Approach to Hybrid Metric-Topological SLAM
IEEE Transactions on Robotics, vol. 24, no. 2, pp. 259--270, 2008, (Q2, T1).
2006
High-resolution pursuit for detecting flaw echoes close to the material surface in ultrasonic NDT
NDT and E International, vol. 39, no. 6, pp. 487--492, 2006, (Q1, T1).
A Multi-Agent Control Architecture for a Robotic Wheelchair
Applied Bionics & Biomecanics, vol. 3, no. 3, pp. 179--189, 2006.
Books (3)
2016
2012

Book Chapters (5)
2008
Foundations of Parameterized Trajectories-based Space Transformations for Obstacle Avoidance
Mobile Robots Motion Planning: New Challenges, ch. 2, 2008.
2007
An Efficient Closed-form Solution to Probabilistic 6D Visual Odometry for a Stereo Camera
Advanced Concepts for Intelligent Vision Systems, LNCS (from Advanced Concepts for Intelligent Vision Systems), Delft (The Netherlands), vol. 4678, pp. 932-942, 2007.
A Probabilistic Observation Model for Stereo Vision Systems: Application to Particle Filter-Based Mapping and Localization
3rd Iberian Conference on Pattern Recognition and Image Analysis, LNCS (3rd Iberian Conference on Pattern Recognition and Im. An.), vol. 4477, pp. 346-353, 2007.
A new method for robust and efficient occupancy grid-map matching [3rd. Iberian Conference on Pattern Recognition and Image Analysis (IBPRIA'07)]
LNCS (3rd Iberian Conference on Pattern Recognition and Image An, vol. 4478, pp. 194--201, 2007.
2006
The SENA Robotic Wheelchair Project
DAAAM International Scientific Book, vol. 2006, ch. 20, pp. 235--250, 2006.
Conferences (58)
2025
Aprendizaje de dinámica de mecanismos basado en cuadernos interactivos
Anales de Ingeniería Mecánica, 2025.
2024
Preliminary Results of a Low-Cost Portable Terrestrial LiDAR Based on ICP-SLAM Algorithms. Application to Automatic Forest Digital Inventory
6th Euro-Mediterranean Conference for Environmental Integration (EMCEI-2024), Marrakech, 2024.
2023
Robot tipo Ackermann para tareas de monitorización en edificio bioclimático (in Spanish)
XXIV Congreso Nacional de Ingeniería Mecánica, Las Palmas de Gran Canarias, 2023. 
OpenBeam: Off-Line and On-Line Tools to Solve Static Analysis of Mechanical Structures
Proceedings of the XV Ibero-American Congress of Mechanical Engineering, IACME 2022, pp. 57--63, 2023.
General-Purpose Software Tools in Teaching MMS
Trends in Educational Activity in the Field of Mechanism and Machine Theory, Mechanisms and Machine Science, vol. 128, pp. 201--222, 2023.
2022
OpenBeam: Herramienta offline y online para análisis estático de estructuras (in Spanish)
XV Congreso Iberoamericano de Ingeniería Mecánica, Madrid, 2022. 
Load Disaggregation Through Particle Filtering of Harmonic Features
2022 20th International Conference on Harmonics & Quality of Power (ICHQP), 2022.
2019
A topological entropy‐based approach for damage detection of civil engineering structures
CMMoST 2019: 5th International Conference on Mechanical Models in Structural Engineering, Madrid, pp. 35-42, 2019.
A Modular Optimization Framework for Localization and Mapping
Robotics: Science and Systems, Freiburg (Germany), 2019.
2018
Simulador sísmico de bajo coste para uso en prácticas de docencia (in Spanish)
XXXIX Jornadas de Automática, Badajoz, CEA, pp. 299-305, 2018. 2016
A ROS Reactive navigation system for ground vehicles based on TP-Space transformations
XXXVII Jornadas de Automatica, 2016.
Caracterización de mesa de vibraciones mediante análisis espectral
XXI Congreso Nacional de Ingeniería Mecánica, Elche, Spain, 2016.
3D Coastal Monitoring from very dense UAV-based Photogrammetric Point Clouds
International Joint Conference on Mechanics, Design Engineering & Advanced Manufacturing, Catania (Italy), 2016.
Analysis and Validation of Grid DEM Generation Based on Gaussian Markov Random Field (GMRF)
ISPRS Congress, Praga, 2016.
2015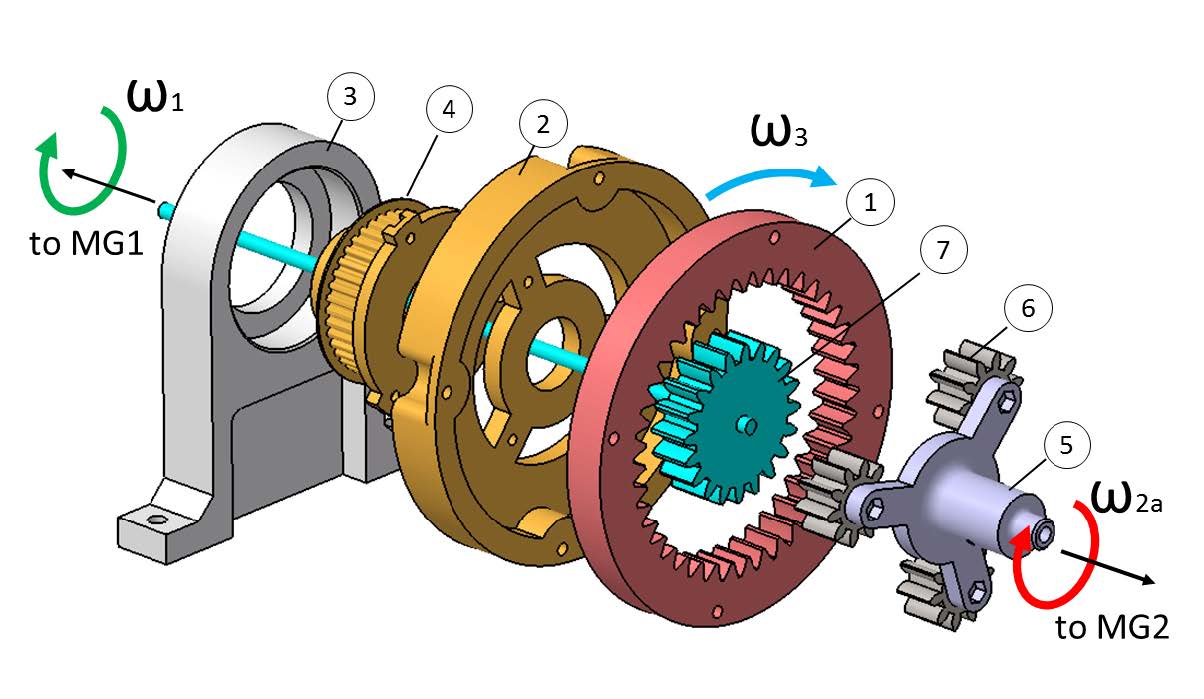
A 3D Printed Power-Split Device for Testing Energy Management Strategies Applied to Hybrid Vehicles
3rd IFAC Workshop on Internet Based Control Education (IBCE), 2015.
Testing the efficiency and accuracy of multibody-based state observers
ECCOMAS Thematic Conference on Multibody Dynamics, pp. 1595-1606, 2015.
A testbed for benchmarking state observers in Multibody Dynamics
ECCOMAS Thematic Conference on Multibody Dynamics, 2015.
2014
A proposed software framework aimed at energy-efficient autonomous driving of electric vehicles
International Conference on Simulation, Modelling, and Programming for Autonomous Robots (SIMPAR 2014), D. Brugali et al. (Eds.): SIMPAR 2014, Lecture Notes in Artificial Intelligence, Bergamo (Italy), vol. 8810, pp. 219-230, 2014.
Acoplamiento flexible de seguridad para la interacción hombre-robot (in Spanish)
XX Congreso Nacional de Ingeniería Mecánica, Málaga, 2014.
Towards Benchmarking of State Estimators for Multibody Dynamics
The 3rd Joint International Conference on Multibody System Dynamics, 2014.
2013
Robots that can smell: motivation and problems
15th International Symposium on Olfaction and Electronic Nose (ISOEN), Daegu, South Korea, 2013.
An Open Source Framework for Simulating Mobile Robotics Olfaction
15th International Symposium on Olfaction and Electronic Nose (ISOEN), Daegu, South Korea, 2013.
ECCOMAS Multibody Dynamics, ECCOMAS, pp. 167-168, 2013.
IEEE International Conference on Robotics and Automation (ICRA), 2013.
ERODE: An Efficient and Robust Outlier Detector and its Application to Stereovisual Odometry
IEEE International Conference on Robotics and Automation (ICRA), 2013.
A Kalman Filter Based Approach to Probabilistic Gas Distribution Mapping
Proceedings of the 28th Annual ACM Symposium on Applied Computing, Coimbra, Portugal, pp. 217--222, 2013.
2012
Integración de actividades docentes en la materia Teoría de Estructuras: entre la teoría y el ejercicio profesional (in Spanish)
III Jornadas sobre innovación docente y adaptación al EEES en las titulaciones técnicas, 2012. 
Calibration of MOX gas sensors in open sampling systems based on Gaussian Processes
IEEE Sensors, Taipei, Taiwan, pp. 1--4, 2012.
2011
Navegación Reactiva de un Robot Móvil usando Kinect
Actas ROBOT 2011, 2011.
Vehículo robotizado para el levantamiento automático de carreteras en 3D (in Spanish)
ROBOT 2011 (III Workshop de Robótica), Sevilla, 2011. 
The Multi-Chamber Electronic Nose (MCE-nose)
IEEE International Conference on Mechatronics, Istambul, Turkey, 2011.
2010
Innovación en las asignaturas relativas a sistemas de control mediante robots Lego Mindstorms NXT
IV Jornadas de Innovación Educativa y Enseñanza Virtual (Universidad de Málaga), Málaga, 2010.
Design of a novel MOS-based electronic nose for changing gas concentrations
1st INTERNATIONAL CONFERENCE ON APPLIED BIONICS AND BIOMECHANICS (ICABB 2010), 2010.
2009
A Statistical Approach to Gas Distribution Modelling with Mobile Robots - The Kernel DM+V Algorithm
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009.
SANCHO, a Fair Host Robot. A Description
IEEE International Conference on Mechatronics (ICM'09), Malaga (Spain), 2009.
2008
Efficient Probabilistic Range-Only SLAM
IEEE/RSJ 2008 International Conference on Intelligent Robots and Systems (IROS08), Nice (France), pp. 1017--1022, 2008.
An Optimal Filtering Algorithm for Non-Parametric Observation Models in Robot Localization
IEEE International Conference on Robotics and Automation (ICRA'08), Pasadena, CA (USA), pp. 461--466, 2008.
A Pure Probabilistic Approach to Range-Only SLAM
IEEE International Conference on Robotics and Automation (ICRA'08), Pasadena, CA (USA), pp. 1436--1441, 2008.
2007
Experimental kinematics for wheeled skid-steer mobile robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego (USA), 2007.
Una Formulacion Cerrada para Odometria Visual Probabilistica en 6D con una Camara Estereo (in Spanish)
XXVIII Jornadas de Automática, XXVIII Jornadas de Automática, 2007.
Ladar Scan Preprocessing for Robust Motion Estimation
International Symposium on Signal Processing and its Applications (ISSPA), Sharjah (United Arab Emirates), 2007.
Localización de vehículos utilizando tecnología UWB y GPS en entornos interiores y exteriores (in Spanish)
XXVIII Jornadas de Automática, Huelva (Spain), 2007.
Mobile Robot Ego-Motion Estimation by Proprioceptive Sensor Fusion
International Symposium on Signal Processing and its Applications (ISSPA'07), Sharja (U.A.E.), 2007.
A New Approach for Large-Scale Localization and Mapping: Hybrid Metric-Topological SLAM
IEEE International Conference on Robotics and Automation (ICRA'07), Roma (Italy), 2007.
A Consensus-based Approach for Estimating the Observation Likelihood of Accurate Range Sensors
IEEE International Conference on Robotics and Automation (ICRA'07), Roma (Italy), 2007.
Silla de Ruedas Robótica para Dar más Independencia a su Usuario (in Spanish)
II Congreso Internacional de Robótica, Domótica y Teleasistencia (DRT4All'07), Madrid (Spain), pp. CD--ROM, 2007.
Integrating SLAM into Gas Distribution Mapping
Proceedings of ICRA Workshop on Robotic Olfaction – Towards Real Applications, Rome (Italy), 2007.
A Rao-Blackwellisation Approach to GDM SLAM - Integrating SLAM and Gas Distribution Mapping
3rd European Conference on Mobile Robots, Freiburg (Germany), 2007.
Combination of UWB and GPS for indoor-outdoor vehicle localization
IEEE International Symposium on Intelligent Signal Processing, Alcala de Henares (Madrid), 2007.
Application of UWB and GPS Technologies for Vehicle Localization in Combined Indoor-Outdoor Environments
International Symposium on Signal Processing and its Applications (ISSPA), Sharjah (United Arab Emirates), 2007.
2006
Un Enfoque Probabilístico para la Estimación del Desplazamiento de un Robot Móvil Dotado de Visión Estéreo (in Spanish)
XXVII Jornadas de Automática, Almería (Spain), 2006.
Consistent Observation Grouping for Generating Metric-Topological Maps that Improves Robot Localization
IEEE International Conference on Robotics and Automation (ICRA'06), Orlando, Florida (USA), 2006.
An Entropy-Based Measurement of Certainty in Rao-Blackwellized Particle Filter Mapping
IEEE International Conference on Intelligent Robots and Systems (IROS'06), Beijing (China), 2006.
The Trajectory Parameter Space (TP-Space): A New Space Representation for Non-Holonomic Mobile Robot Reactive Navigation
IEEE International Conference on Intelligent Robots and Systems (IROS'06), Beijing (China), 2006.
A Description of the SENA Robotic Wheelchair
13th IEEE Mediterranean Electrotechnical Conference (MELECON), Benalmádena-Málaga (Spain), 2006.
2005
Extracción de Grupos Perceptuales en Imágenes a Partir de Técnicas de partición Espectral de Grafos (in Spanish)
XXVI Jornadas de Automática, Alicante (Spain), 2005.
Towards a Multi-Agent Software Architecture for Human-Robot Integration
4th International Workshop on Practical Applications of Agents and Multiagent Systems (IWPAAMS), Leon (Spain), 2005.
Patents (7)
2019
Soporte a tres alturas para equipos de medida de parámetros ambientales [National patent ES-2661542_B1]
, 2019.
2017
2013
ES2389802 B1,
2013. 2012
ES patent -ES2380472 A1,
2012. 2009
ES2308920 B1,
2009.
Vehículo terrestre para el análisis topográfico de firmes de infraestructuras lineales (in Spanish)
ES1069405 U,
2009. PhD Theses (1)
2009
Master Theses (2)
2005
Desarrollo de un Receptor de Radio Programada en PC mediante Interfaz USB (in Spanish)
ETSI Telecomunicación,
2005. 2002
Diseño e Implementación de Herramientas de Desarrollo para Símplez y Algorítmez (in Spanish)
ETS Linares,