Próximo: Acciones
de grupos sobre Arriba:
Grupos Anterior: Motivación y definiciones básicas
Ejemplos importantes del álgebra lineal
El estudio de
grupos en geometría se reduce, por lo general, a los grupos de matrices. El
ejemplo más simple es el grupo de matrices invertibles ![]() .
Esto es simplemente el conjunto de números reales no nulos con su
multiplicación estándar. El análogo en dimensiones más altas es el grupo de
matrices invertibles
.
Esto es simplemente el conjunto de números reales no nulos con su
multiplicación estándar. El análogo en dimensiones más altas es el grupo de
matrices invertibles ![]() junto con su multiplicación habitual.
junto con su multiplicación habitual.
Antes de seguir adelante, es necesario asegurarse de
que podemos resolver sin esfuerzo los siguientes ejercicios:
Ejercicio 1.4 Multiplicar las matrices
Ejercicio 1.5 Calcular mentalmente la inversa de la matriz
Ejercicio 1.6 Calcular el determinante de
Si no se puede resolver estos problemas en un breve
espacio de tiempo, entonces no está listo para este curso. Debería ponerse en
contacto con el profesor.
Además del grupo ![]() de matrices
de matrices ![]() invertibles de números reales, también
tenemos el grupo
invertibles de números reales, también
tenemos el grupo ![]() de matrices
de matrices ![]() invertibles de números complejos. Nótese
que
invertibles de números complejos. Nótese
que ![]() es un subgrupo de
es un subgrupo de ![]() . De hecho, casi todos los grupos
interesantes en la geometría son subgrupos de
. De hecho, casi todos los grupos
interesantes en la geometría son subgrupos de ![]() . Hay algunos ejemplos:
. Hay algunos ejemplos:
El grupo lineal especial: El conjunto de matrices ![]() reales (resp. complejas) cuyo
determinante es igual a uno. Se denota por
reales (resp. complejas) cuyo
determinante es igual a uno. Se denota por ![]() ( Resp.
( Resp. ![]() ) y se llama el grupo lineal especial.
Si
) y se llama el grupo lineal especial.
Si ![]() , Entonces la transformación de
, Entonces la transformación de ![]() definida por
definida por ![]() conserva el volumen y la orientación.
conserva el volumen y la orientación.
El grupo ortogonal y el grupo ortogonal especial: Una matriz cuadrada, se dice que es ortogonal si su
traspuesta es igual a su inversa. El conjunto de matrices ![]() ortogonales se denota por
ortogonales se denota por ![]() . El subconjunto de
. El subconjunto de ![]() formado por las
matrices de determinante uno se denota
formado por las
matrices de determinante uno se denota ![]() . Estos dos grupos
se llaman el grupo ortogonal y el grupo ortogonal especial, respectivamente.
. Estos dos grupos
se llaman el grupo ortogonal y el grupo ortogonal especial, respectivamente.
Ejercicio 1.7 (05) Denotemos el producto escalar o interior
de dos vectores ![]() y
y ![]() en
en ![]() por
por ![]() .
.
Probar que si ![]() es una matriz
es una matriz ![]() y
y ![]() es su matriz
traspuesta, entonces
es su matriz
traspuesta, entonces ![]() . Concluir que si
. Concluir que si ![]() , entonces
, entonces ![]() . Probar que si
. Probar que si ![]() es una matriz ortogonal, la distancia
entre
es una matriz ortogonal, la distancia
entre ![]() y
y ![]() es igual a la distancia entre
es igual a la distancia entre ![]() y
y ![]() . Probar que el
determinante de una matriz ortogonal es
. Probar que el
determinante de una matriz ortogonal es ![]() o
o ![]() .
.
El grupo unitario y el grupo unitario especial: Si ![]() es una matriz cuadrada de números
complejos, el adjunto de
es una matriz cuadrada de números
complejos, el adjunto de ![]() , denotado por
, denotado por ![]() , es el
resultado de trasponer y luego conjugar todas sus entradas. Por ejemplo
, es el
resultado de trasponer y luego conjugar todas sus entradas. Por ejemplo
Una matriz
cuadrada compleja se dice que es unitaria si su adjunta es igual a su inversa.
El conjunto de matrices ![]() unitarias se denota por
unitarias se denota por ![]() . El subconjunto de
. El subconjunto de ![]() que consiste en las matrices de determinante uno se denota por
que consiste en las matrices de determinante uno se denota por ![]() . Se llaman respectivamente el grupo unitario y el grupo unitario
especial.
. Se llaman respectivamente el grupo unitario y el grupo unitario
especial.
Ejercicio 1.8 (05) Definimos el producto hermitiano de dos
vectores ![]() y
y ![]() en
en ![]() por
por ![]() .
.
1.
Probar que si ![]() es una matriz
es una matriz ![]() compleja y
compleja y ![]() es su matriz adjunta, entonces
es su matriz adjunta, entonces ![]() . Concluir que si
. Concluir que si ![]() es unitaria, entonces
es unitaria, entonces
![]()
2.
Probar que si ![]() es una matriz unitaria, la distancia entre
es una matriz unitaria, la distancia entre ![]() y
y ![]() es igual a la distancia
entre
es igual a la distancia
entre ![]() y
y ![]() .
.
3.
Probar que el
determinante de una matriz unitaria es un número complejo de módulo uno.
Ejercicio 1.9 (*10) En lo que sigue ![]() denotará la
matriz identidad
denotará la
matriz identidad ![]() y
y ![]() es la matriz
es la matriz ![]() dada por
dada por
1.
Probar que el conjunto
de todas las matrices ![]() reales que conmutan con
reales que conmutan con ![]() se puede identificar de forma natural
con el conjunto de los números complejos.
se puede identificar de forma natural
con el conjunto de los números complejos.
2.
Por la analogía con el
apartado anterior, demostrar que el grupo ![]() se puede ver como un subgrupo de
se puede ver como un subgrupo de ![]() .
.
3.
Definimos el producto
simpléctico de dos vectores sobre ![]() mediante
mediante ![]() . Demostrar que el producto simpléctico
es antisimétrico y no degenerado.
. Demostrar que el producto simpléctico
es antisimétrico y no degenerado.
4.
Definimos el grupo
lineal simpléctico ![]() como el conjunto todas las matrices
como el conjunto todas las matrices ![]() reales
reales ![]() que satisfacen
que satisfacen ![]() . Demostrar que
la intersección de
. Demostrar que
la intersección de ![]() y
y ![]() es igual a
es igual a ![]() .
.
Ejercicio
1.10 (15) Probar que el grupo ![]() se
puede identificar con la esfera unidad
se
puede identificar con la esfera unidad ![]() -dimensional en
-dimensional en ![]() .
.
Definición
1.3
La traza de una matriz cuadrada es la suma de todos los elementos de su
diagonal. El conmutador de dos matrices ![]()
![]() e
e ![]() , se denota por
, se denota por ![]() , y se
define como
, y se
define como ![]() .
.
Ejercicio
1.11 (05) En lo que sigue ![]() ,
, ![]() e
e ![]() son matrices
son matrices ![]() con
con ![]() invertible.
invertible.
1.
Probar que ![]() .
.
2.
Probar que si ![]() tiene traza cero, entonces
tiene traza cero, entonces ![]() también tiene
traza cero.
también tiene
traza cero.
El siguiente
ejercicio lo hemos tomado del libro de Abraham y Marsden sobre los fundamentos
de mecánica (véase [1]).
Ejercicio
1.12 (15) Sea ![]() el conjunto de
matrices
el conjunto de
matrices ![]() complejas de traza cero
complejas de traza cero ![]() tal que
tal que ![]() .
.
1.
Probar que ![]() es un espacio vectorial y calcular su dimensión.
es un espacio vectorial y calcular su dimensión.
2.
Probar que si ![]() y
y ![]() , entonces
, entonces ![]() .
.
3.
Las tres matrices
spin de Pauly de la mecánica cuántica son
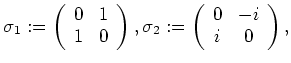 y
y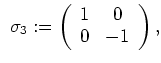
Probar que las
matrices ![]() ,
, ![]() forman una base de
forman una base de ![]() con
las relaciones de conmutación
con
las relaciones de conmutación
![]()
Donde ![]() es igual a
es igual a ![]() si
si ![]() es una permutación
par de
es una permutación
par de ![]() y
y ![]() si no lo es.
si no lo es.
4.
Identificar ![]() con
con ![]() asignando a cada
vector
asignando a cada
vector ![]() la matriz
la matriz
![]()
Si ![]() denota el producto vectorial de dos vectores en
denota el producto vectorial de dos vectores en ![]() , Probar que
, Probar que
![]()
5.
Probar que el
determinante de ![]() es igual a
es igual a ![]() .
.
6.
Sea ![]() en
en ![]() y consideremos la
transformación
y consideremos la
transformación ![]() de
de ![]() en sí mismo definida por
en sí mismo definida por ![]() . Probar que
. Probar que ![]() es una transformación lineal que conserva distancias y tiene
determinante igual a uno.
es una transformación lineal que conserva distancias y tiene
determinante igual a uno.
7.
Probar que si ![]() y
y ![]() están
en
están
en ![]() , entonces
, entonces ![]() si y sólo si
si y sólo si ![]() .
.
De este
ejercicio concluimos que el grupo ![]() , que vimos antes
identificado con la
, que vimos antes
identificado con la ![]() -esfera, tiene una correspondencia
natural
-esfera, tiene una correspondencia
natural ![]() a
a ![]() con el grupo de rotaciones
con el grupo de rotaciones ![]() .
.
Próximo:
Acciones
de grupos sobre Arriba: Grupos Anterior: Motivación y
definiciones básicas