 | 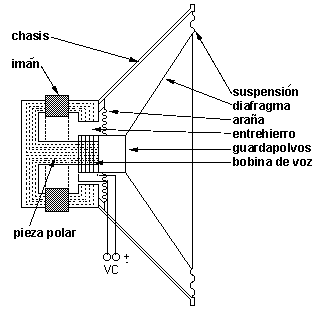 |
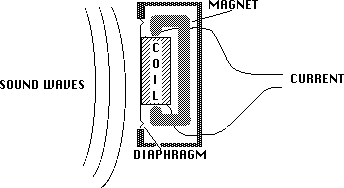
| Micro de bobina | Altavoz de bobina |
| | |
| Micro de bobina | Altavoz de bobina |
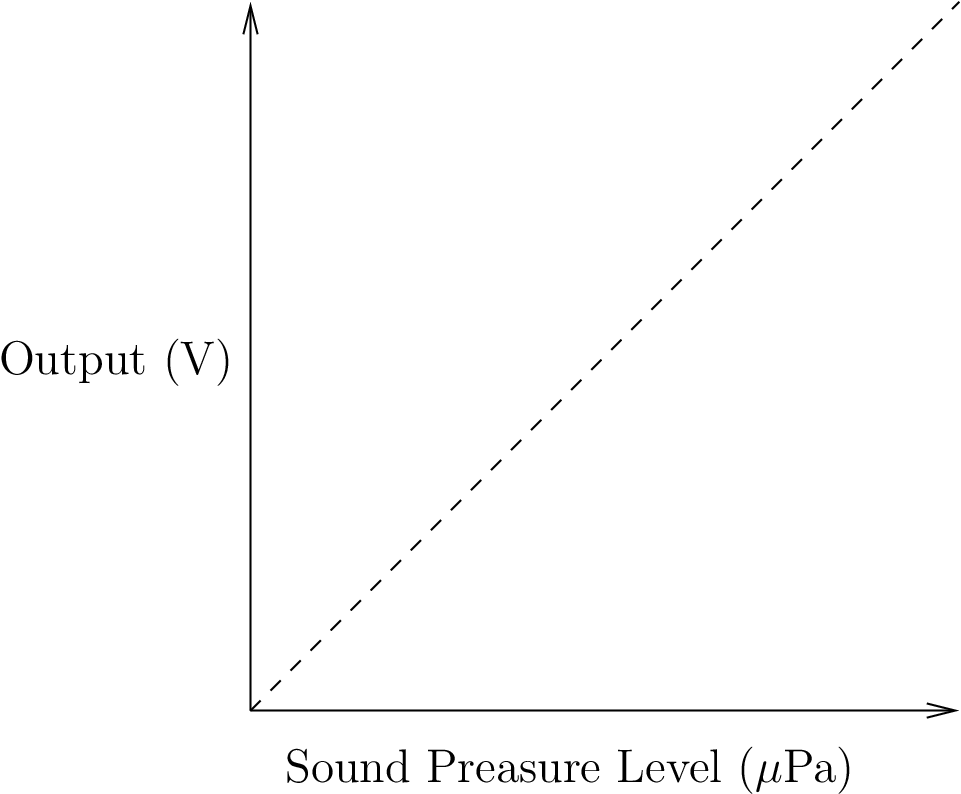
misma potencia todas las intensidades sonoras.
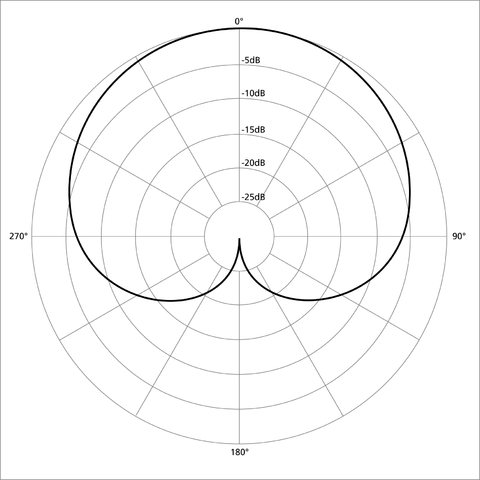 | 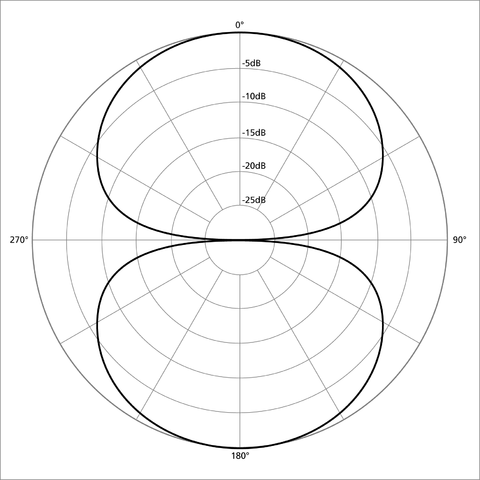 | 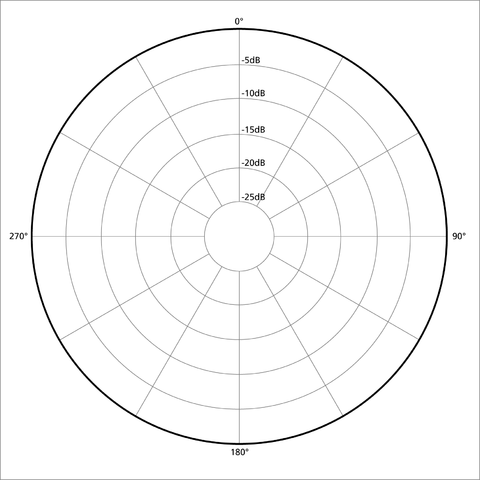 |
| Unidireccional | Bidireccional | Omnidireccional |
| (1) |
donde depende de la frecuencia.

| (2) |
donde es la ganancia del transistor.
![]()

El éxito de Dolby se debió a que el sistema era completamente compatible con los sistemas estéreo normales: una cinta o un disco grabado con Surround podía escucharse en un equipo normal, con dos altavoces.
En muchos episodios de una grabación estéreo, el contenido de los canales y son prácticamente idénticos. Esto puede ocurrir, por ejemplo, cuando un avión situado justo en frente (en el centro de la pantalla) viene en nuestra dirección, pasa por encima de nuestra cabeza y se marcha por nuestra espalda.
Para poder realizar la sensación de que es justamente el avión la fuente del sonido, Dolby propuso situar un canal llamado “center” () justo detrás de la tela de la pantalla y otro llamado “surround” () a nuestra espalda. Por definición,
Dolby sabía que el oido no es sensible a la fase de la señal, sólo a su amplitud y propuso codificar el canal trasero como la diferencia de la fase de y la fase de . Desfasar una señal de audio respecto de otra significa retrasarla en el tiempo algunos milisegundos. En la escena del avión, donde se cumple que , cuando no existe desfase:
Y cuando existe desfase máximo ():
Así, si no queremos que por el canal central suene nada, desfasamos de , y viceversa. Y y se escuchan igual que antes, haya o no desfase.