




Department of Informatics/ Automatic, Robotics and Mechatronics research group
Interactive Tools
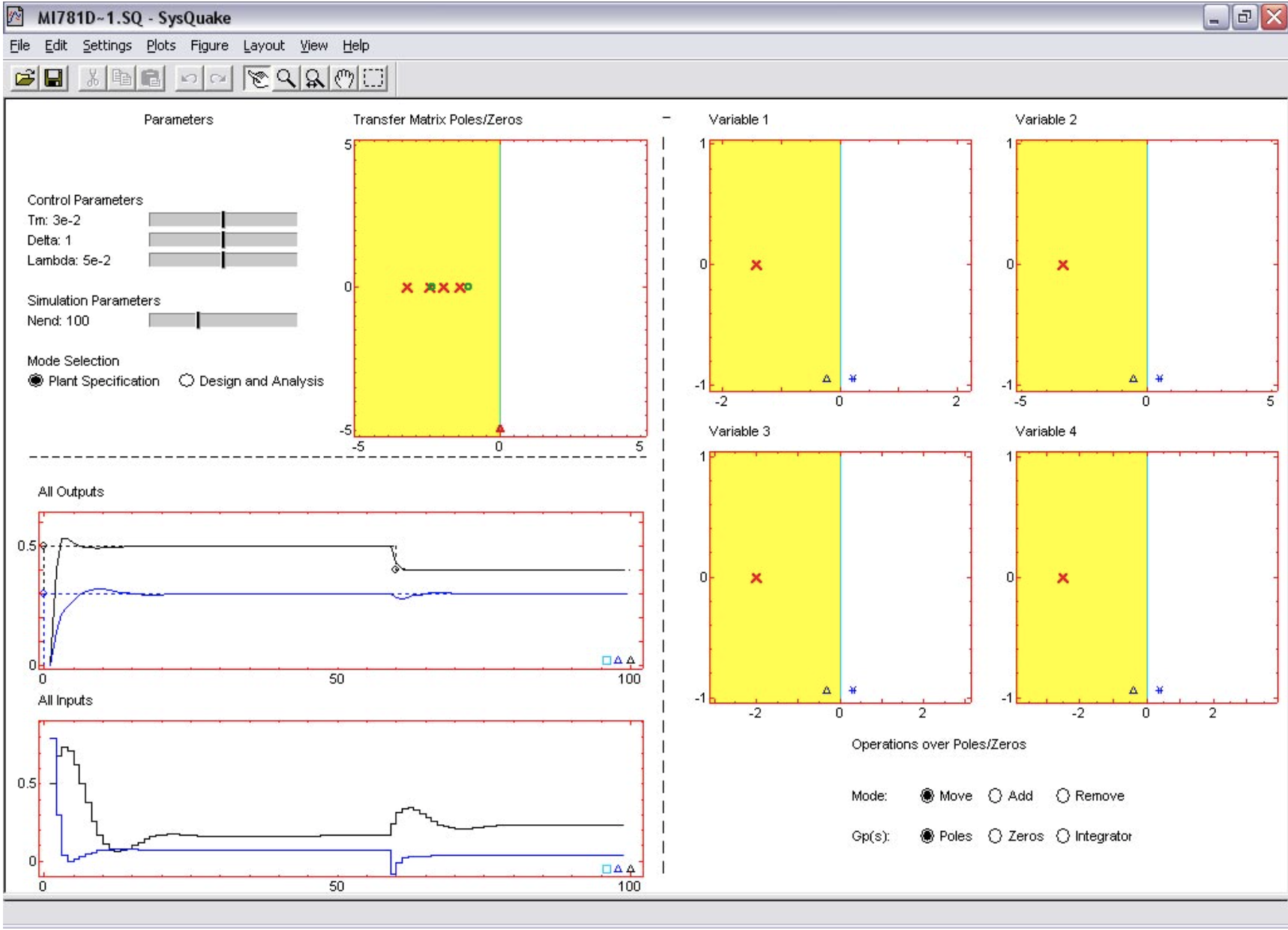
MIMO-GPCIT: Generealized Interactive Tool for MIMO Systems
MIMO-GPCIT (Mingle Inputs Mingle Outputs Generalized Predictive Control Interactive Tool ) is an interactive tool for control education. Its objective is to help the students to learn and understand the basic concepts involved in Generalized Predictive Control (GPC) for multivariable systems. It is an extension of SISO-GPCIT. Using this tool the student can put into practice the adquired knowledge on this control technique using simple examples of unconstrained cases, effect of plant/model mismatch and robustness issues, disturbance rejection, effect of constraints in the design and performance of the controller, stability issues, etc. Thus, using this tool the student can better understand the underlying theory interactively. It is possible to analyse how the closed loop system response is affected by changes in different design parameters such as weighting factors Delta(on tracking errors) and Lambda(on control effort), the prediction (N1 and N2) and control (Nu) horaizons, the sample time, the T-polynomial, etc. At the same time, different constraints related to physical limits or security issues, desired performance or stability can be selected and activated to see their effect on the performance of the controlled system.
@ Copyrigth (J.L. Guzmán, M. Berenguel and S. Dormido)
Contact data
Prof. José Luis Guzmán
System Engineering and Automatics area
Address:
Ctra. Sacramento s/n
04120, Almería
Building CITE III, Planta: 2, Office: 2.16.3
Phone: +34 950 21 4133
e-mail:
joguzman@
ual.es
joseluis.guzman@
ual.es
Actualizado por: José Luis Guzmán Sánchez
Fecha:



